Optimizing Conv2D from Scratch: CPU to GPU Journey (Part 1)
In this blog series, I’ll walk through my journey optimizing a canonical Conv2D kernel — starting from a deeply nested CPU loop, all the way to handcrafted CUDA kernels that rival cuDNN and CUTLASS.
Table of Contents
- Motivation
- Background: What Does Conv2D Actually Do?
- Roofline: Theoretical Peak Performacne
- CPU Implementation and Tuning
- What’s Next
Motivation
The convolution layer is the cornerstone of modern neural networks. This series documents the engineering path from naive to state-of-the-art implementations of a Conv2D operation — measuring the work, insight, and tooling required to bridge the performance gap.
We chose a canonical configuration:
- Input: NHWC shape
(10, 224, 224, 128) - Filter: KRSC shape
(128, 3, 3, 128) - Output: NPQK shape
(10, 224, 224, 128) - Padding: 1, Stride: 1, Dilation: 1
This setup represents a mid-depth convolutional layer common in real-world CNNs (e.g., EfficientNet, ResNet), and its optimization is relevant for both training and inference pipelines.
Background: What Does Conv2D Actually Do?
At its core, a 2D convolution computes weighted dot products over local spatial windows across input channels. Here’s a visualization with a 3×3 kernel. Imagine each 3×3 input patch has a depth of C = 128. Each filter produces a single output value, and we use K = 128 such filters. This gives a filter shape of KRSC = (128, 3, 3, 128).
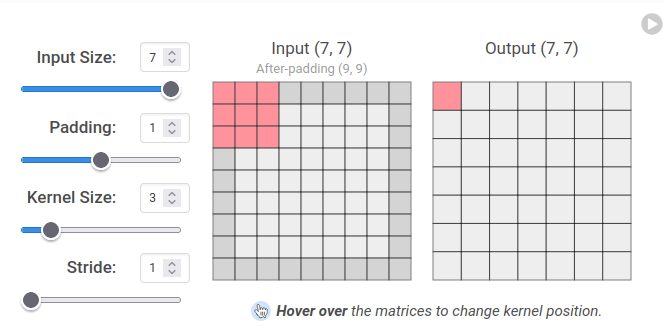
Credit: https://poloclub.github.io/cnn-explainer/
Mathematically, for each output element O[n, p, q, k], we compute:
Note: r and s range from -1 to 1 due to centered 3×3 kernels.
Roofline: Theoretical Peak Performance
Before diving into code, we estimate the ideal performance bounds on our hardware to benchmark how close our implementation gets to peak throughput.
We start by analyzing arithmetic intensity (AI) — the ratio of computation to memory traffic. This tells us whether the kernel is compute-bound or memory-bound.
Arithmetic Intensity (AI) Analysis of Conv2D
Total Floating Point Operations (FLOPs)
Each output element performs:
- CRS = 128 × 3 × 3 = 1152 multiply-accumulates
- Each MAC = 2 FLOPs
Total FLOPs:
\[\text{FLOPs} = N \times P \times Q \times K \times C \times R \times S \times 2 = 147.975 \text{ GFLOPs}\]Total Memory Accessed
Unique elements accessed:
- Input (NHWC): 10 × 224 × 224 × 128 = 64,100,352
- Filter (KRSC): 128 × 3 × 3 × 128 = 147,456
- Output (NPQK): 10 × 224 × 224 × 128 = 64,100,352
Total: 128,598,160 elements
- FP32: 128,598,160 × 4 bytes = 514.39 MB
- FP16: 128,598,160 × 2 bytes = 257.20 MB
Arithmetic Intensity (AI)
- FP32: 147.975 GFLOPs / 514.39 MB = 287.67 FLOP/byte
- FP16: 147.975 GFLOPs / 257.20 MB = 575.34 FLOP/byte
Roofline: CPU vs GPU
CPU: AMD Ryzen 2700
| Spec | Value |
|---|---|
| Cores | 8 (SMT disabled) |
| Clock speed | 3.2 GHz |
| SIMD width | AVX2 (8 FP32 per register) |
| Peak FLOPs | 409.6 GFLOP/s |
| Mem bandwidth (DDR4-3200) | ~51.2 GB/s |
| Ridge Point | 8.0 FLOP/byte |
GPU: RTX 2070 Super (CUDA Cores)
| Spec | Value |
|---|---|
| SMs | 40 |
| CUDA cores per SM | 64 |
| Clock speed | 1.8 GHz |
| Peak FLOPs | 9.216 TFLOP/s |
| Mem bandwidth | 448 GB/s |
| Ridge Point | 20.57 FLOP/byte |
GPU: RTX 2070 Super (Tensor Cores)
| Spec | Value |
|---|---|
| Tensor cores (40 SMs × 8) | 320 |
| Peak FLOPs (FP16) | 73.728 TFLOP/s |
| Ridge Point | 164.57 FLOP/byte |
Conclusion
In all cases, the kernel AI is well above each device’s ridge point, which means:
- The kernel is compute-bound on both CPU and GPU.
- We can estimate ideal runtimes by dividing FLOPs by peak device throughput:
| Device | Peak FLOP/s | Ideal Time |
|---|---|---|
| Ryzen 2700 | 409.6 GFLOP/s | 361 ms |
| RTX 2070 (CUDA) | 9.216 TFLOP/s | 16.05 ms |
| RTX 2070 (Tensor) | 73.728 TFLOP/s | 2.01 ms |
CPU Implementation and Tuning
Naive CPU Kernel (NCHW Layout)
Our initial implementation used NCHW and ran in 150 seconds — far from the ideal 361 ms.
extern "C" void conv2d(float* input, float* weight,
int n,
int h, int w, int c_in,
int r, int c_out,
int stride,
int padding,
float* z)
{
int p = (h + 2*padding - r) / stride + 1;
int q = (w + 2*padding - r) / stride + 1;
const int r_offset = (r - 1) / 2;
const int s_offset = (r - 1) / 2;
for (int n_i = 0; n_i < n; ++n_i) {
for (int k_i = 0; k_i < c_out; ++k_i) {
for (int p_i = 0; p_i < p; ++p_i) {
for (int q_i = 0; q_i < q; ++q_i) {
float acc = 0;
for (int c_i = 0; c_i < c_in; ++c_i) {
for (int r_i = 0; r_i < r; ++r_i) {
int h_i = p_i + r_i - r_offset;
if (h_i < 0 || h_i >= h) continue;
for (int s_i = 0; s_i < r; ++s_i) {
int w_i = q_i + s_i - s_offset;
if (w_i < 0 || w_i >= w) continue;
int input_index = ((n_i * c_in + c_i) * h + h_i) * w + w_i;
int weight_index = ((k_i * c_in + c_i) * r + r_i) * r + s_i;
acc += input[input_index] * weight[weight_index];
}
}
}
int output_index = ((n_i * c_out + k_i) * p + p_i) * q + q_i;
z[output_index] = acc;
}
}
}
}
}
Improving Cache Locality with NHWC
Switching to NHWC and restructuring loops around the innermost C dimension brought runtime down to 23 seconds — a 6.5× speedup due to better memory locality.
extern "C" void conv2d_nhwc(float* __restrict__ input, float* __restrict__ weight,
int n,
int h, int w, int c_in,
int r, int c_out,
int stride,
int padding,
float* __restrict__ z)
{
int p = (h + 2*padding - r) / stride + 1;
int q = (w + 2*padding - r) / stride + 1;
const int r_offset = (r - 1) / 2;
const int s_offset = (r - 1) / 2;
for (int n_i = 0; n_i < n; ++n_i) {
for (int p_i = 0; p_i < p; ++p_i) {
for (int q_i = 0; q_i < q; ++q_i) {
for (int k_i = 0; k_i < c_out; ++k_i) {
float acc = 0;
for (int r_i = 0; r_i < r; ++r_i) {
int h_i = p_i + r_i - r_offset;
if (h_i < 0 || h_i >= h) continue;
for (int s_i = 0; s_i < r; ++s_i) {
int w_i = q_i + s_i - s_offset;
if (w_i < 0 || w_i >= w) continue;
for (int c_i = 0; c_i < c_in; c_i += 8) {
int input_index = ((n_i * h + h_i) * w + w_i) * c_in + c_i;
int weight_index = ((k_i * r + r_i) * r + s_i) * c_in + c_i;
float tmp_acc = 0;
for (int c_offset = 0; c_offset < 8; ++c_offset) {
tmp_acc += input[input_index + c_offset] * weight[weight_index + c_offset];
}
acc += tmp_acc;
}
}
}
int output_index = ((n_i * c_out + k_i) * p + p_i) * q + q_i;
z[output_index] = acc;
}
}
}
}
}
Adding OpenMP Parallelism
By parallelizing over the outer loops (e.g., n, p, q), we utilized 8 physical CPU cores:
#pragma omp parallel for collapse(2) schedule(static)
for (int n_i = 0; n_i < n; ++n_i) {
for (int p_i = 0; p_i < p; ++p_i) {
for (int q_i = 0; q_i < q; ++q_i) {
for (int k_i = 0; k_i < c_out; ++k_i) {
...
This further reduced runtime to 3.4 seconds, a 44× overall improvement.
Summary: CPU Conv2D Performance
| Version | Layout | Parallelism | Time | Speedup |
|---|---|---|---|---|
| Naive CPU | NCHW | None | 150 s | 1× |
| Naive CPU | NHWC | None | 23 s | 6.5× |
| CPU + OMP | NHWC | 8 cores | 3.4 s | 44× |
This final CPU implementation achieved about 11% of theoretical peak, which is quite reasonable for a memory-coordinated workload without heavy vectorization or compiler intrinsics.
What’s next?
In Part 2, we’ll explore cuDNN and CUTLASS baselines on the GPU, and eventually challenge them with our own hand-rolled CUDA kernels.
The big question: How hard is it to get from 3.4 seconds down to 2.01 ms